|
I am Hao GONG (龔 昊), former Expert in Autonomous Driving and Visual Perception Tech Lead at Enjoy Move Tech. Previously, I was Co-Founder and Algorithm Scientist at Landmark Vision Tech. Prior to this role, I was an Expert in ADAS/Auto Driving R&D at OFilm Group and a Research Scientist at Third Research Institute of Ministry of Public (TRIMP). I received my PhD from GIPSA Lab at Université Grenoble Alpes under the supervision of Prof. Michel DESVIGNES, where I specialize in combinatorial optimization based medical image processing and classification. Prior to that, I received my Bachelor's and Master's degrees in Automation and Pattern Recognition from School of Automation at Southeast University. |
|
News and Updates
[Mar 2024] Our paper Comparison of Methods in Human Skin Decomposition is on arXiv.
|
ResearchI am interested in machine/deep learning, computer vision and optimization, with application to autonomous driving, intelligent traffic and medical image analysis. |
Journal Publications |
|
|
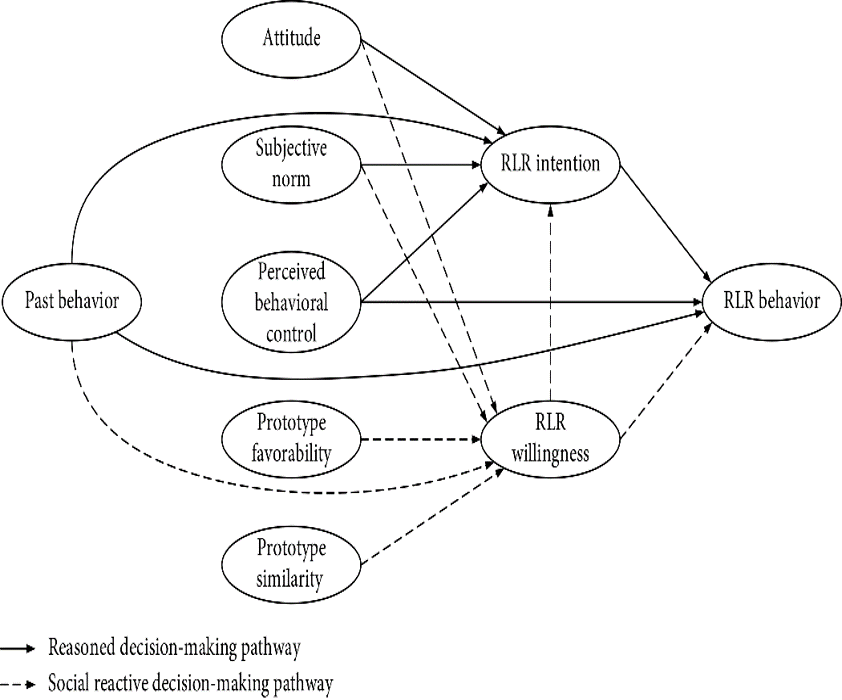
Understanding Electric Bikers’ Red-Light Running Behavior: Predictive Utility of Theory of Planned Behavior vs Prototype Willingness ModelTianpei Tang, Hua Wang, Xizhao Zhou, Hao Gong Journal of Advanced Transportation (JAT), 2020 paper / We aim to understand e-bikers’ RLR behavior based on structural equation modeling. Specifically, the predictive utility of the theory of planned behavior (TPB), prototype willingness model (PWM), and their combined form, TPB-PWM model, is used to analyze e-bikers’ RLR behavior, and a comparison analysis is made. |
Conference Proceedings |
|
|
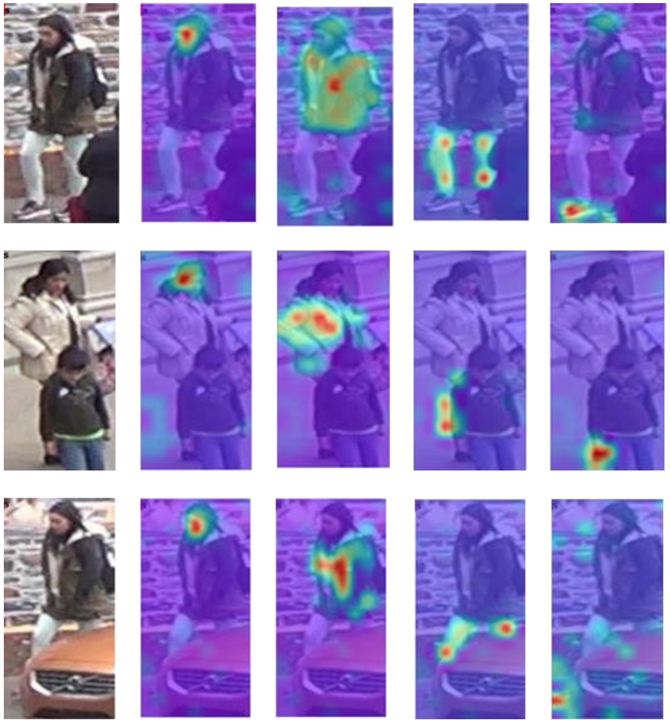
Pose Estimation and Occlusion Augmentation Based Vision Transformer for Occluded Person Re-IdentificationYilin Wei, Dan Niu, Hao Gong, Yichao Dong, Xisong Chen, Ziheng Xu Jiangsu Annual Conference on Automation (JACA), 2022 paper / We propose the Pose Estimation and Occlusion Augmentation Based Vision Transformer (POVT) which leverage Pose Estimation Guided Vision Transformer (PEGVT) and an Occlusion Generation Module (OGM) to extract discriminative partial features. |
|
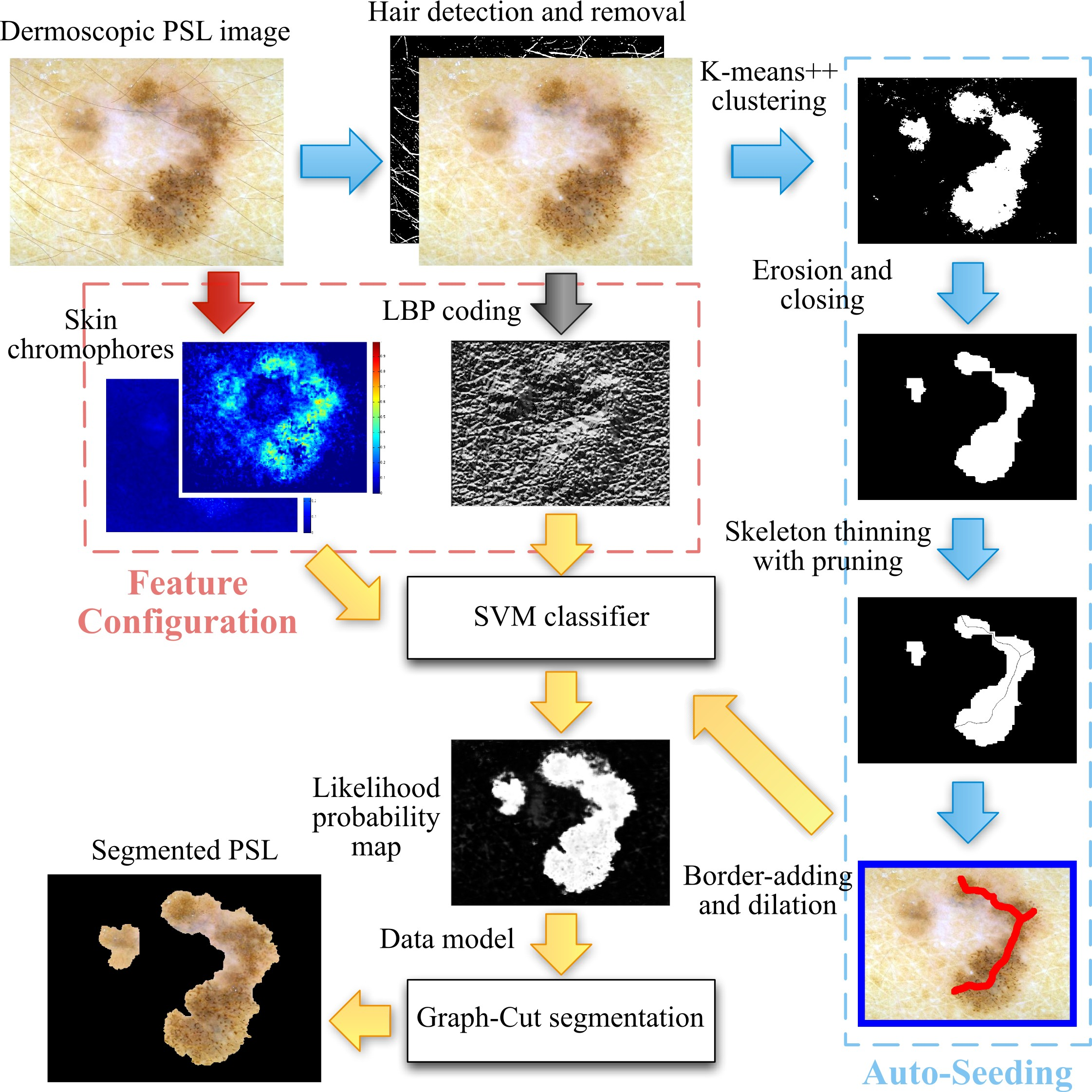
New Data Model for Graph-Cut Segmentation: Application to Automatic Melanoma DelineationRazmig Kéchichian*, Hao Gong*, Marinette Revenu, Olivier Lézoray, Michel Desvignes (* equal contribution) IEEE International Conference on Image Processing (ICIP), 2014 paper / We define a new data model for graph-cut image segmentation, according to probabilities learned by a classification process. Unlike traditional graph-cut methods, the data model takes into account not only color but also texture and shape information. |
|
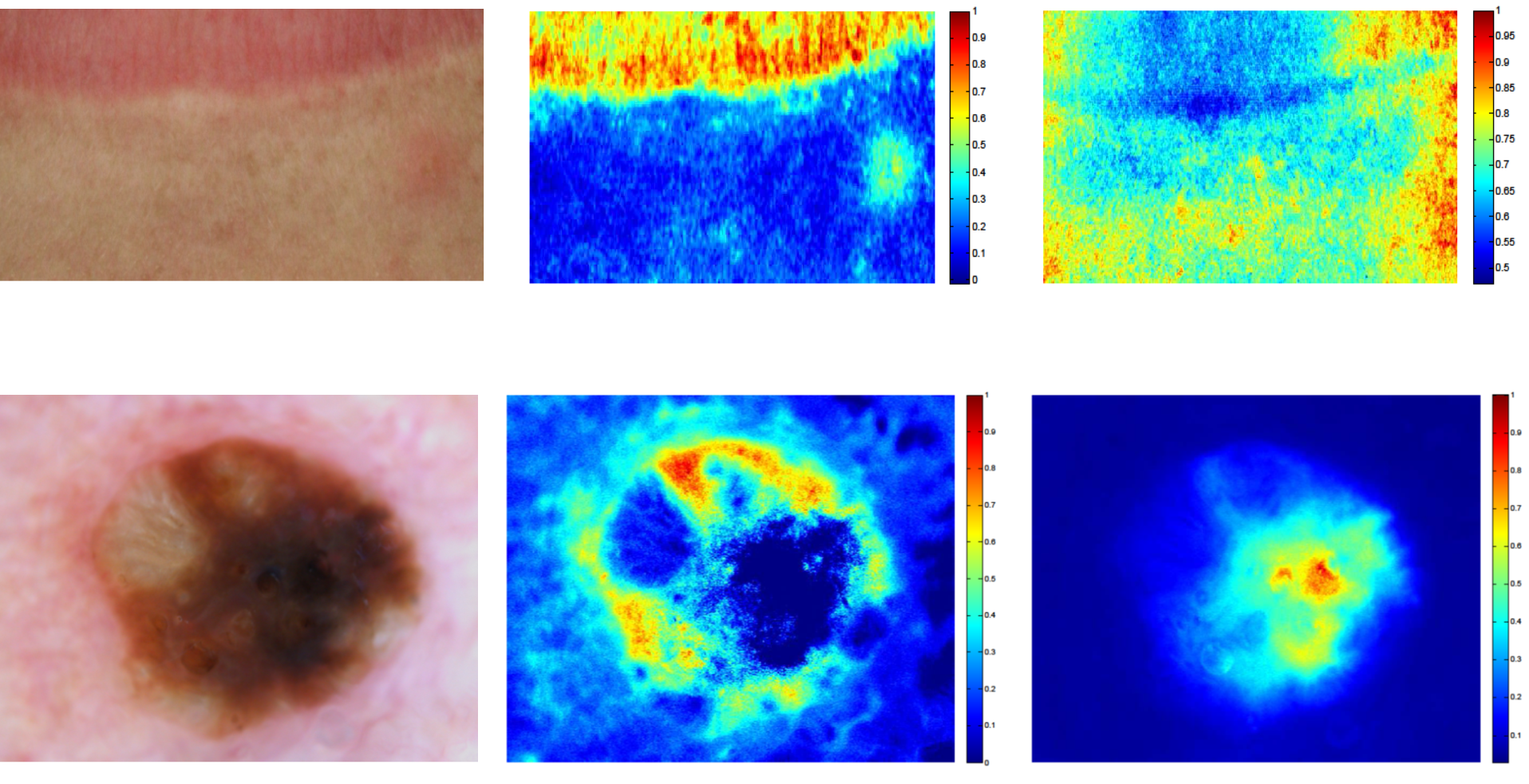
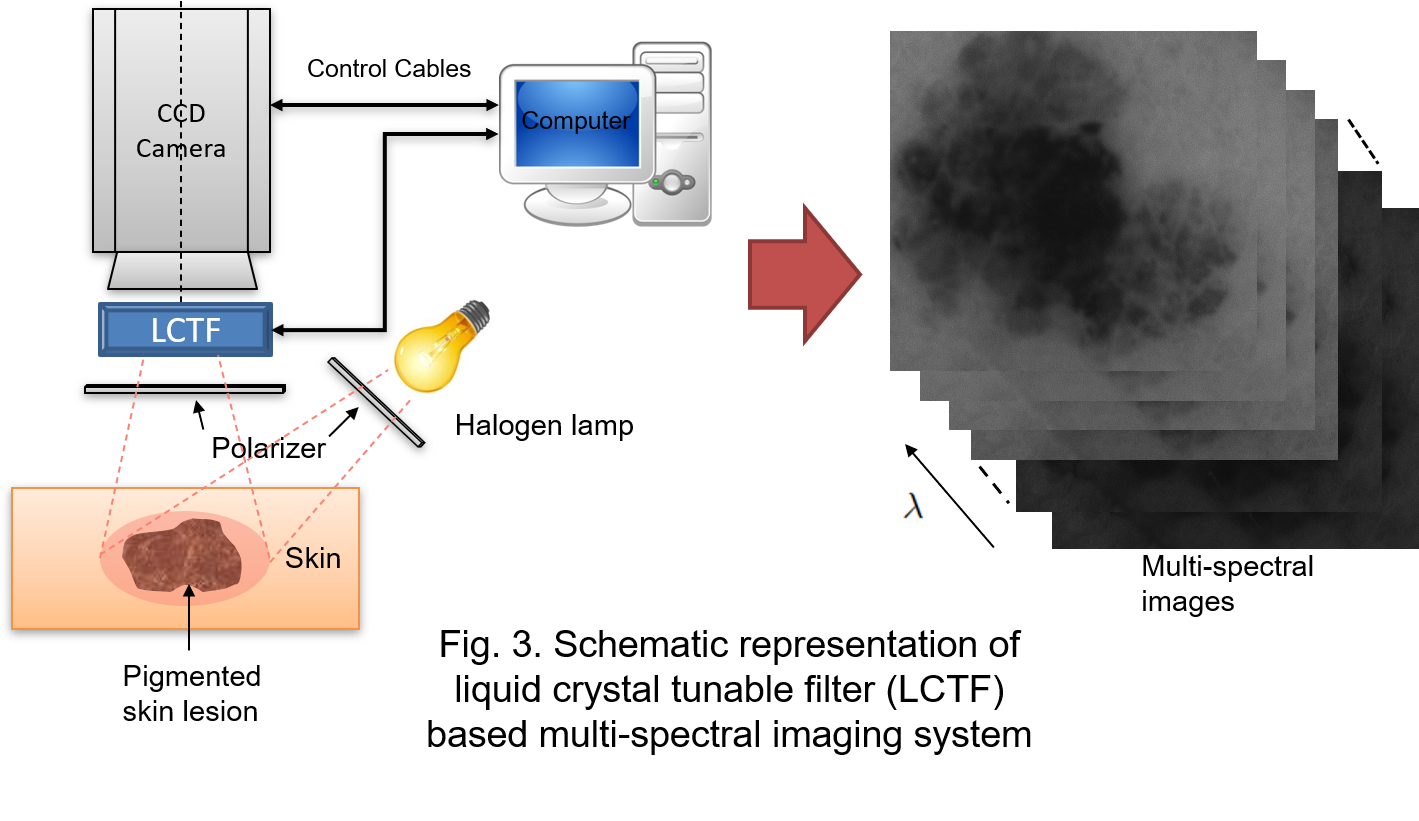
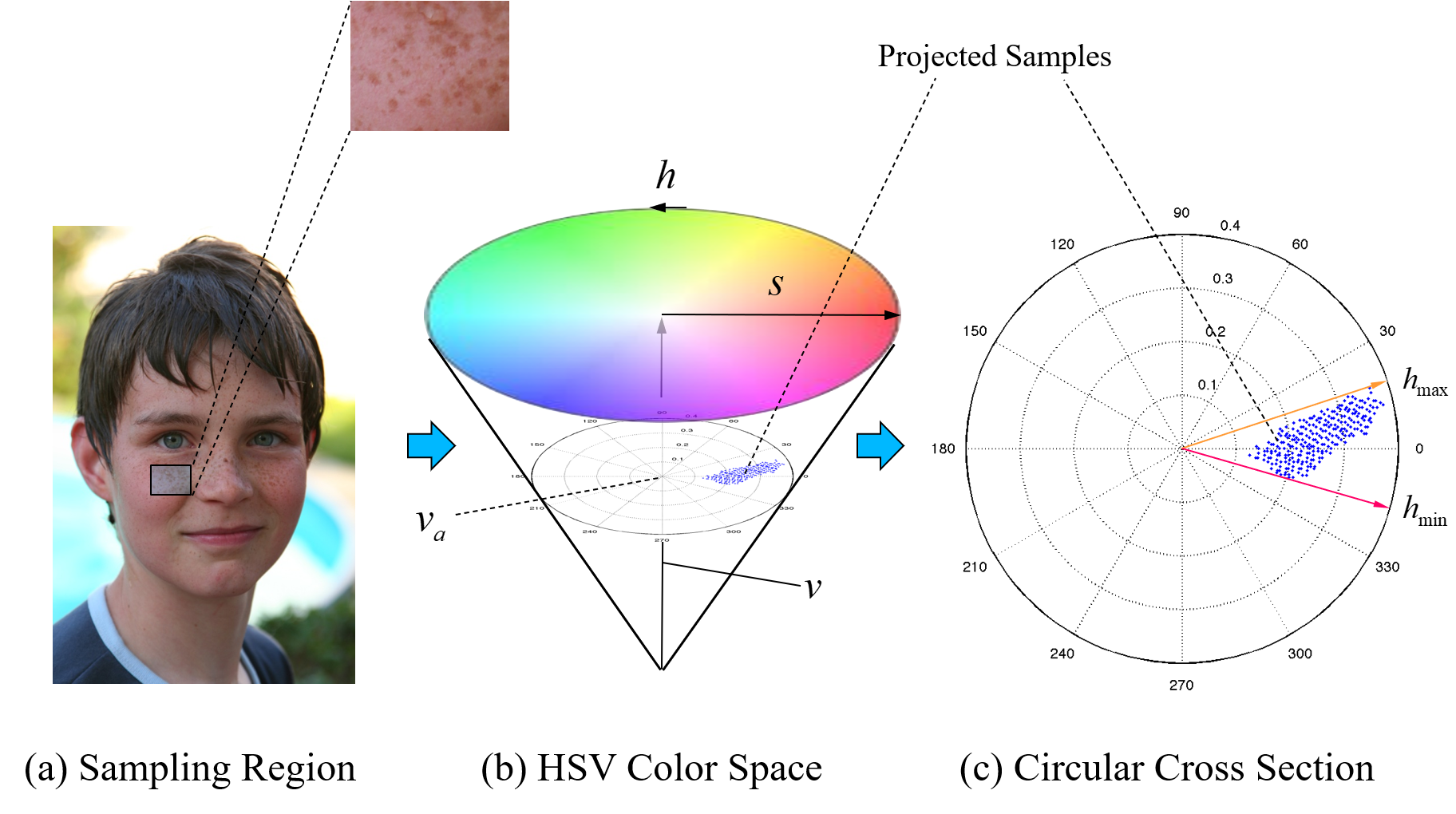
Quantification of Pigmentation in Human Skin ImagesHao Gong, Michel Desvignes IEEE International Conference on Image Processing (ICIP), 2012 paper / We show how our Beer-Lambert law based model-fitting method can be more accurate in quantification of skin hemoglobin and melanin. |
|
Skin Hemoglobin and Melanin Quantification on Multi-Spectral ImagesHao Gong, Michel Desvignes IASTED International Conference on Imaging and Signal Processing in Health Care and Technology (ISPHT), 2012 paper / slides / We propose and compare two different approaches for quantification of skin hemoglobin and melanin on multi-spectral images. Quantitative evaluation through graph-cut segmentation on melanoma indicates that model-fitting method obtains more accurate quantification than NMF. |
Preprints |
|
|
Comparison of Methods in Human Skin DecompositionHao Gong, Michel Desvignes arXiv:2404.00552, 2024 Various methods for skin pigment decomposition are reviewed comparatively and the performance of each method is evaluated both theoretically and experimentally. In addition, isometric feature mapping (Isomap) is introduced in order to improve the dimensionality reduction performance in context of skin decomposition. |
|
|
Interactive Graph-Cut Segmentation Using Pixel-Wise PosteriorsHao Gong, Michel Desvignes arXiv, 2024 In this paper we investigate the potential of nonlinear posteriors within the graph-cut optimization framework. By Existing graph cuts based segmentation methods sharper the extrema of cost function likelihood distributions of intensity or color information a prior information levet-set, We propose a graphcut based image segmentation method by posterior probability. |
Thesis |
|
|
Segmentation d'Images Couleurs et Multispectrales de la PeauHao Gong Ph.D. Thesis, Université de Grenoble, 2013 paper / slides / Accurate border delineation of pigmented skin lesion (PSL) images is a vital first step in computer-aided diagnosis (CAD) of melanoma. This thesis details a global framework of automatic segmentation of melanoma, which comprises two main stages: automatic selection of “seeds” useful for graph cuts and the selection of discriminating features. This tool is compared favorably to classic graph-cut based segmentation methods in terms of accuracy and robustness. |
ProjectsBesides my academic work listed in the publications above, a sampling of my work in industry. |
Semantic Visual Mapping and Localization (Semantic Visual SLAM) in Project AVP (Automated Valet Parking)Enjoy Move Tech 2022-09-30 We develop a new SLAM technique to build semantic visual map for ego-positioning feature in AVP application, primarily using inputs from semantic detection of road markings and IMU-wheel encoder coupled odometry. As the vehicle maneuvers, the map evolves in the form of a dynamic semantic graph comprising semantic attributes and odometry. Graph optimization then periodically minimizes pose errors of semantic objects and egomotion, updating both local and global mapping. Once complete, vehicle re-localization can be effectively achieved in familiar environments, providing accurate pose estimations that guide vehicle navigation, path planning and control towards designated parking spots. |
|
|
2.5D Multi-Target Multi_Camera Human Tracking and Re-Identification (Project Virtual Turnstile in Smart Building of Shanghai Electric)Landmark Vision Tech 2021-05-08 patent / Multi-Target Multi_Camera (MTMC) Human Tracking ReID |
|
Automatic Search, Localization and Stacking of 2D CrystalsLandmark Vision Tech 2020-03-10 |
|
Trained Parking (SAIC P2P Project)Intelligent Vehicle and Auto Driving, OFilm 2017-11-02 Trained Parking (A Long Distance Autonomous Parking Function with Route Memory) (C++/OpenCV/DBoW) achieving mapping distance up to 200m and centimeter-level error of localization. |
|
Vehicle Kinematic Model, Time Stitching and Moving Object DetectionIntelligent Vehicle and Auto Driving, OFilm 2016-07-25 patent / Ackermann Steering, Epipole Constraint, optical flow |
Talks
From GPUs to Edge Computing Devices: On the Deployment of Visual AI Model InferenceGuest Lecture at Shanghai Zhenhua Heavy Industries Company Limited (ZPMC), 2022-01-17 slides /
An Overview of the Application of AI-Based Biometric Recognition Techniques in Financial SecurityGuest Lecture at Bank of Communications, Pudong Branch, Shanghai, 2019-05-23 slides /
Decompostion of Skin Color ImageAnnual Seminar of GdR ISIS (Groupement de Recherche, Information Signal Image viSion), Paris, 2011-10-12 slides / website / |
ServiceI have reviewed for ICIP2014, ACCV2022, ICASSP2023, ICASSP2024. |
Honors and Awards [2010] National Scholarship of China
|
|
|
|
© 2024 Hao GONG. All Rights Reserved.
|